 资讯(xùn)
资讯(xùn)

“闭(bì)上你美丽的眼睛,我来带你感受世(shì)界(jiè)”如果(guǒ)你的心(xīn)仪(yí)对象对你深情的说这句话,会不会感觉特(tè)别浪漫呢(ne)?现在,软体(tǐ)机器人也有同样的能(néng)力(lì)了(le)。
人类(lèi)的进(jìn)化从:早(zǎo)期猿人-晚期猿(yuán)人-早期(qī)智人(古人)-晚期智人(新人)到现代人。机器人的升(shēng)级从传统机(jī)器(qì)人:僵硬,机械,毫无感知到现在变的很(hěn)柔软,可(kě)以(yǐ)感知触摸。此(cǐ)前机器人大多通过运动相机、激光雷达系统以及(jí)算法来获取并生成环境三维信息。但现在软体机器人因骨骼惊(jīng)奇、身体(tǐ)柔软(ruǎn),可(kě)以穿梭于一般机器(qì)人(rén)难以触达的地方。人类的改变是几百万年来环境的影响,不断进化,机器人是人(rén)类(lèi)制(zhì)造出来的产物,见证着人类科技的进步,不断的(de)向前发展(zhǎn)。
软体机(jī)器人是(shì)怎样的呢?可以感知(zhī)的电子皮肤又是怎么(me)一(yī)回事?让我们来看看麻(má)神理工学院的杰作。
近日,麻省理工学(xué)院发明的一种电子(zǐ)皮肤可以覆盖在(zài)软体(tǐ)机器人上,帮助这些(xiē)机器(qì)人即便(biàn)「蒙(méng)上双眼」也能(néng)对外(wài)界的情况进行感知。其原理是(shì)利用(yòng)来自其“感测”皮肤的运动和(hé)位置数(shù)据(jù),使软机械(xiè)臂能够了(le)解其(qí)在3D空间中的配置。
外网科技媒(méi)体评(píng)论(lùn)称,这个由柔性极高的材(cái)料((类似于在(zài)生(shēng)物体内发现的(de)材料))制作(zuò)而成(chéng)的软机器人,也受到目(mù)前机器人向着更(gèng)安全方向的思路(lù)影响,比(bǐ)传统刚性机器人的更安(ān)全(quán),更柔(róu)性,更具弹性和适应性,以及具备(bèi)生物特性的新一代机器人全新替(tì)代品(pǐn)。

但是(shì)难点同样存在!例如对这(zhè)些可变形机器人进行自主(zhǔ)控制就是一项艰巨的(de)任务,因为这些(xiē)新软体机器人可以在(zài)任何给(gěi)定时刻沿几乎(hū)无(wú)限个(gè)方向移动,这使得研究人员很难通过编(biān)程或者示教,训练用于驱动自动化设备的规划和控制模型。
原先,实现(xiàn)自主控(kòng)制的传统方法(控制系统)是使用具有多个运动(dòng)捕(bǔ)捉相机(jī)的大型视觉(jiào)系统,该系统能(néng)为机器人(rén)提供(gòng)有关3D运(yùn)动和位置的反馈(kuì)。但(dàn)是,目前对于实际应用中的这个新软体机器人而言,这是不切实际(jì)的。
发表在《IEEE机器人与自(zì)动化快报》上(shàng)的论(lùn)文中,研究人员描述了一种(zhǒng)配套软体传感(gǎn)器系统,该系统覆盖机器人的身(shēn)体,以(yǐ)提供“本体感觉”,即感知其身体的运动和位置。该反馈会进(jìn)入一种新颖(yǐng)的(de)深(shēn)度学习模型,该模型可筛选(xuǎn)出噪声并捕获(huò)清晰的信号,以计算机器人的3D位置。研究人员在这个看起来类(lèi)似于橡树干的软机器人手臂上(shàng)验(yàn)证了他们(men)的(de)系统,让该机器人手(shǒu)臂可以自动摆(bǎi)动和伸展,并(bìng)可以预(yù)测自己的空(kōng)间位置(zhì)。

图(tú)片来源:麻(má)省理工学院
这些研究人(rén)员(yuán)的软(ruǎn)传感(gǎn)器是(shì)将导电(diàn)硅胶片(piàn)切成折纸(zhǐ)形状,使它们具有“压阻”特性,这(zhè)意味着它们在应变时会改变(biàn)电阻。当传感(gǎn)器响应机械(xiè)臂的(de)拉伸和压(yā)缩而变形时,其电阻将(jiāng)转换为输出电压,然后将其用作(zuò)与该(gāi)运动相关的信号(hào)。
麻省理工学院计算机科学(xué)与人工实验室(CSAIL)的博士后Ryan Truby表示,该传感器可以使用(yòng)人类现成的材料(liào)制造,这意味着今后任何实(shí)验室都可以开发自己的系统。
他说(shuō):“我们正在感测软机器人特性,使其从传感(gǎn)器(而(ér)不是视觉系(xì)统)获取反馈以(yǐ)进行控制,而不是和原先一样通过视觉(jiào)系(xì)统进(jìn)行控制。” “例如,我(wǒ)们想使用(yòng)这些(xiē)柔软的机器人(rén)树干(gàn)来自动定向和控(kòng)制自己,捡拾东(dōng)西并与世(shì)界互动。这是向这种(zhǒng)更复杂的自动(dòng)化控制迈出的第一步(bù)。”
未来的目标之一是(shì)帮助制造出(chū)可以更加(jiā)灵巧地处(chù)理和(hé)操纵环境中物体的人造肢(zhī)体。CSAIL主任Daniela Rus和电机工程(chéng)与计算机科学系的Andrew and Erna Viterbi教授合着一本书表示,他说:“想想人类自己的身体:您可以闭上眼睛,根据皮肤的反馈来(lái)了(le)解世界。” “我们希望为软机器人设计相(xiàng)同的功能。”
塑造软传感器
完(wán)全集成的(de)人体传感器(qì)是软机器人(rén)技术的(de)长期目标。传(chuán)统(tǒng)的刚性传感(gǎn)器会损害(hài)软(ruǎn)机器人的自然柔(róu)韧性,使其设计和(hé)制造复(fù)杂化,并可能导致各种机械故(gù)障。因此,基于软材料的(de)传感器是一种更合适(shì)的替代方案(àn),但(dàn)是其(qí)设(shè)计需要专门的材料和程序运行方法,这使得许多(duō)机器人实验室(shì)难以在软机器人中制造和集成它们。
有一天,在(zài)他的CSAIL实验室(shì)工作期间,寻(xún)找传感器(qì)材(cái)料(liào)的灵(líng)感时,Truby和(hé)这些新(xīn)材料建立(lì)了(le)有趣的联系。他说:“我(wǒ)发现这些(xiē)用于(yú)电磁干扰屏蔽的导电材料薄片可以在(zài)任何地方成卷购买。” 这些材料具有“压阻”特性,这意味(wèi)着它们在(zài)应变时会(huì)改变(biàn)电阻。Truby意识到,如果将它们放在运动物体(tǐ)上(shàng)的某些位置,它们可(kě)以制(zhì)成有效(xiào)的软传感器。当传感(gǎn)器响应于(yú)躯干的(de)拉伸和压缩而变(biàn)形时,能其电阻将(jiāng)转换为特定的输出电压,然后将该电压用作与该运动相关的信号。
但是这(zhè)种材料的(de)伸缩(suō)性不高,这将限制其在软(ruǎn)机(jī)器人中的使用。受kirigami(提出折纸的一种(zhǒng)变化形(xíng)式,其中包(bāo)括(kuò)对(duì)材料进行切割(gē))的启(qǐ)发(fā),Truby设计(jì)并用激光切割了矩形的导电硅胶片,将其切割(gē)成各种(zhǒng)图(tú)案,例如成(chéng)排的小孔或类似链节围(wéi)栏的交(jiāo)叉切片。Truby说,这使它(tā)们更加灵活,可拉伸,而且“看起来漂亮”。
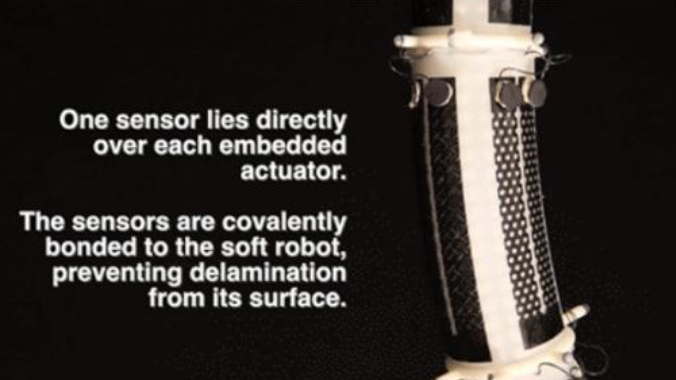
研(yán)究人员设计的机(jī)器人躯干包括三个部分,每个部分带有四(sì)个用于移动手臂的(de)流体(tǐ)致动器(总共12个)。他们在每个段上(shàng)融合了(le)一个传(chuán)感器,每个传感器覆盖并收集了来自软机器人中一个(gè)嵌入(rù)式执行(háng)器的数据。他们(men)使用了“等离子键合”技术,该技术可以使(shǐ)一种(zhǒng)材料的表面通电,使其与另一种材料键合。大约(yuē)需要(yào)几个小时才能成型出数十(shí)个(gè)传(chuán)感(gǎn)器(qì),这些传感器可以使用手(shǒu)持式等离子结合设备结合到软机(jī)器人上。

图片来源:麻省(shěng)理工学(xué)院
如假设的(de)那样,在实验(yàn)中他们将(jiāng)传感器安在了一个行李箱上,传感器(qì)确(què)实(shí)捕获了行李箱的总体运(yùn)动。但(dàn)是他们真的很吵(chǎo)。“从本质上讲,按我们传(chuán)统的观念(niàn)来看(kàn),它(tā)们在许多方面都是非理想的传感器,因为噪音是工业上(shàng)非(fēi)常讨厌的事。”特(tè)鲁比说。“但这(zhè)只是(shì)用软导电材料(liào)制造传(chuán)感器的普遍事实。性能(néng)更高且更可靠的传感器需要(yào)大多数机器人实(shí)验室所(suǒ)没有的专用工具制造。”
于是,为(wéi)了(le)仅使用传感器来(lái)估(gū)算(suàn)软机器(qì)人的配置,研(yán)究(jiū)人(rén)员建(jiàn)立了一(yī)个深度(dù)神(shén)经网(wǎng)络,通过筛(shāi)查噪(zào)声以(yǐ)捕获有意义的反馈信号来(lái)完成大部分繁重的(de)工作。研究人员开发(fā)了一种(zhǒng)新(xīn)模(mó)型,以运动学方式(shì)描述了软机(jī)器(qì)人(rén)的形状(zhuàng),从而大大减(jiǎn)少了处理模型所需的变量数(shù)量。
图片来源:麻省理(lǐ)工学(xué)院
在对比实验中,研究人(rén)员让软机器(qì)人的躯(qū)干摆动,并(bìng)以(yǐ)随(suí)机配置将自己延伸(shēn)大约一个(gè)半(bàn)小时,他们使用传统的运(yùn)动捕捉系统获取(qǔ)地面真实数据,同时在训(xùn)练中,该模型也自主分析了来(lái)自其传感器的数据以预测配置,并将(jiāng)其预测与同时收集的地面(miàn)真实数据进行比较(jiào)。这样,模型(xíng)“学习”以将信号模(mó)式从其传感器映射到实际配置。结果表明,对于某些更稳定(dìng)的(de)配置,机器(qì)人的传感器估(gū)计形状(zhuàng)与地面真实情况相符(fú)。
接(jiē)下来,研究人员旨在探索新的(de)传感器(qì)设计以提高灵(líng)敏度,并开发新的模型和深度学习方法,以减(jiǎn)少每(měi)台新的软机器人所需(xū)的(de)训练时间和流程。他们还(hái)希望(wàng)完善系统,以更好地捕获(huò)机器(qì)人的(de)完(wán)整动态运动。
当前,该软机器人(rén)神经网络和传感器皮肤(fū)对捕捉细微运动(dòng)或动态运动不(bú)敏感(gǎn)。但是(shì),对于(yú)目前基于学习的软机器人控(kòng)制方法而言(yán),这是重要的(de)第一步,特(tè)鲁比说:“像我们的软机器人一样,人类的生活(huó)系统(tǒng)也不一定是完(wán)全精确的(de),因(yīn)此,与我们(men)人类相比,机器人一(yī)开始也不是精确的(de)机器,做一个看起来不那么精(jīng)准的机器(qì)人,我们无(wú)疑做得很好。”
在未来(lái),机器人会越(yuè)来越像人类,但很多方面又(yòu)会(huì)比人类更(gèng)胜一筹(chóu),人类做不到的,他们可(kě)以完成(chéng)。那么(me)问题来了,将来,机(jī)器人(rén)会完(wán)全代替人类吗(ma)?












良信息举(jǔ)报中心(xīn)")
